
SOMANET
CIRCULO
ALL-IN-ONE SERVO DRIVE FOR ROBOTS AND COBOTS
The motion control solution for cobots, robots and intelligent actuators can be used immediately without any adjustments. This saves you additional components and cost-intensive development time.
5 COMPONENTS,
1 SERVO DRIVE
Up to two integrated absolute encoders without extra cable (optional)
Works with any type of PMSM/BLDC motors up to 60 V and 60 A_rms. Optimal mechanical integration for most compact actuators
More than 10 certified safety functions (SIL3, Pl-e)
Integrated brake system (optional) with safe brake control
High-performance servo drive with maximum motion control performance



MOTION CONTROL FOR MODERN ROBOTICS
- Highest performance in drive control/motion control
- Optional: Up to two integrated high-resolution absolute encoders and motor brake
- Certified safety functions
- Numerous sensor interfaces
- Optimum mechanical integration with common actuators
- High-speed EtherCAT interface (DS402, up to 4kHz)
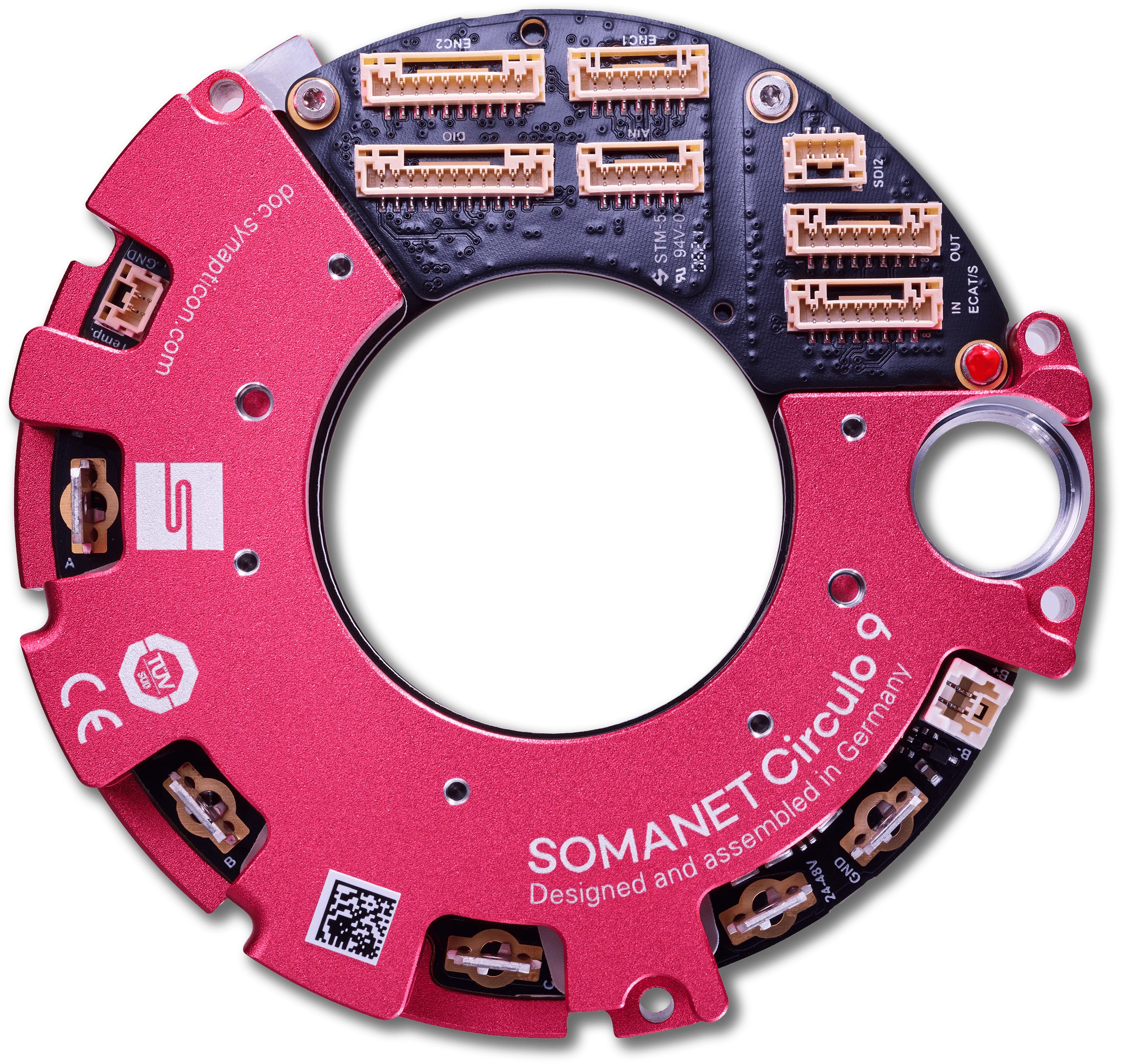
FULLY EQUIPPED SERVO DRIVE
- Works with any PMSM/BLDC motor up to 60 V and 60 arms
- Maximum bandwidth, model predictive field-oriented control for high efficiency
- Dual-loop control, high-frequency control loops, gain scheduling
- Support for 2 position feedback signals of any type, torque sensors, KTY/PT1000
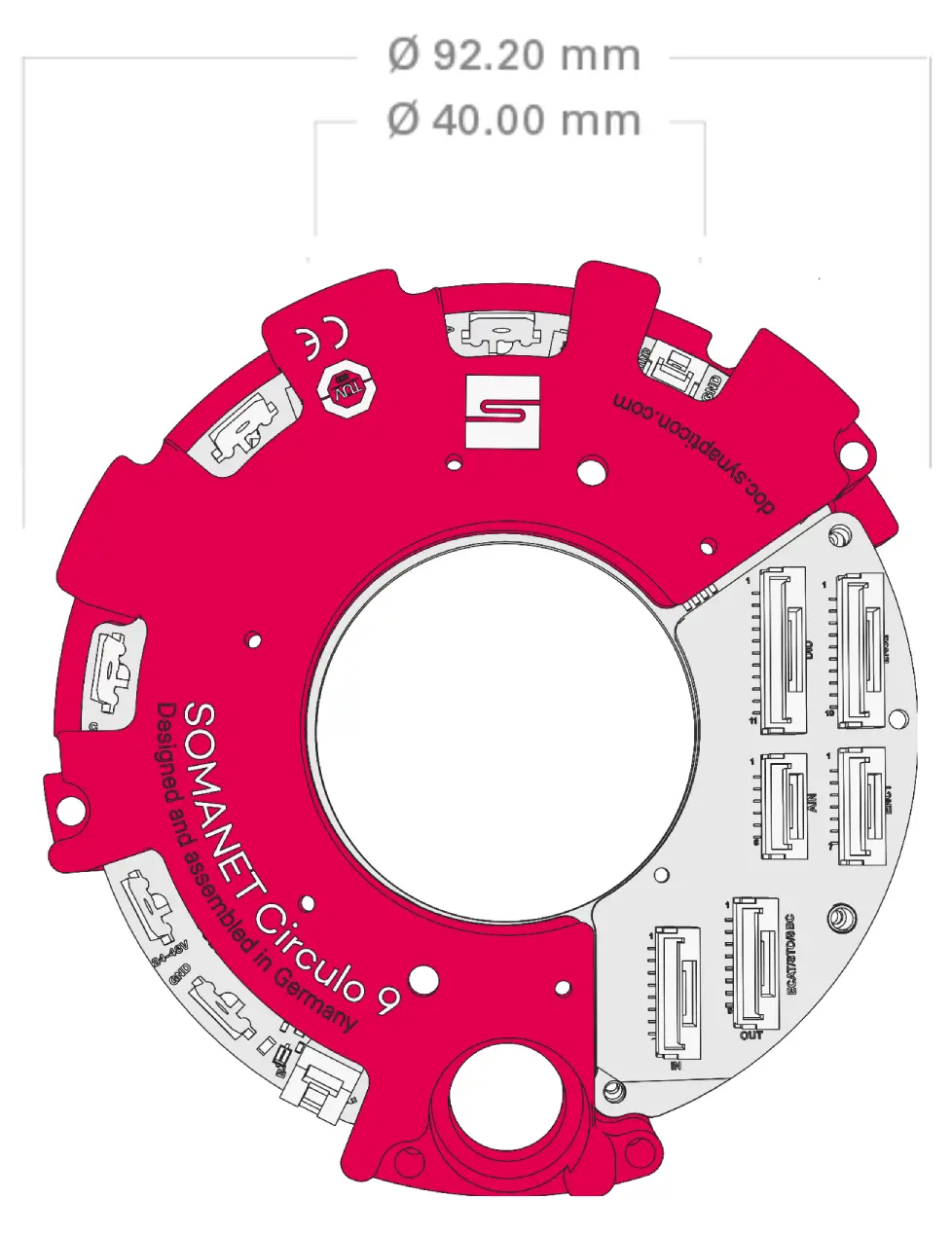
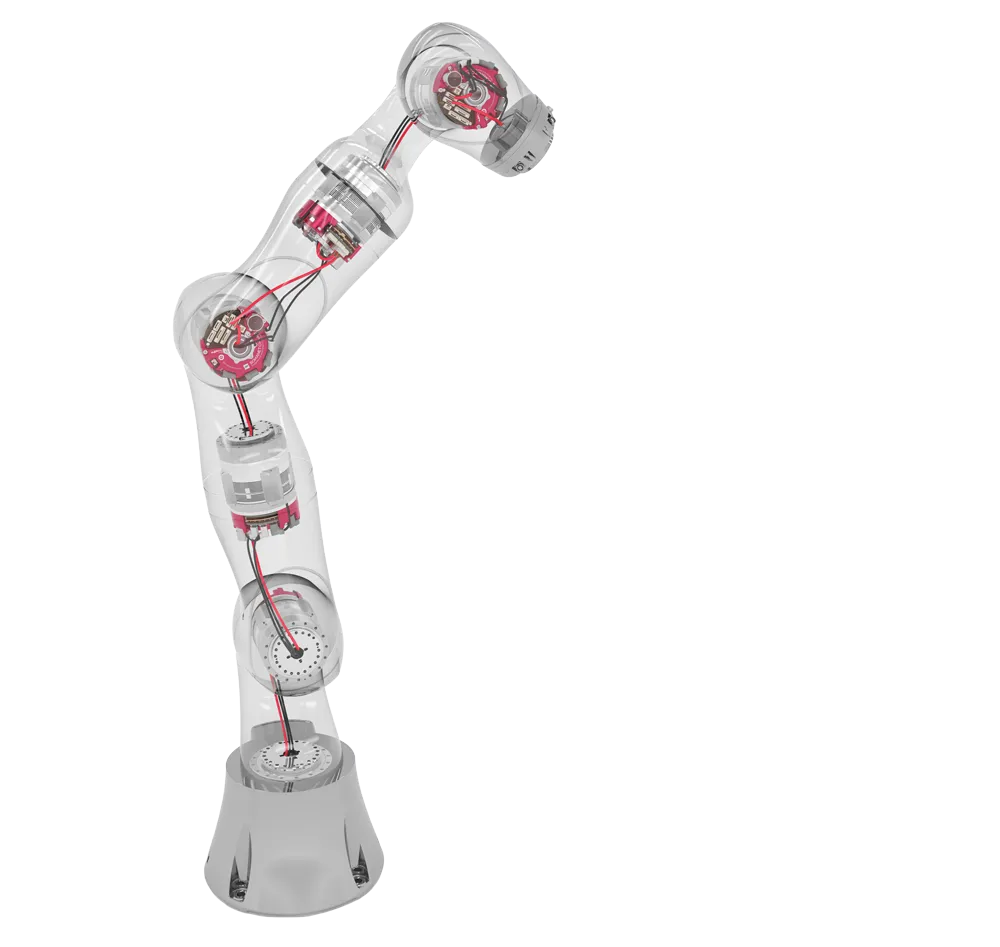
Perfect mechanical integration

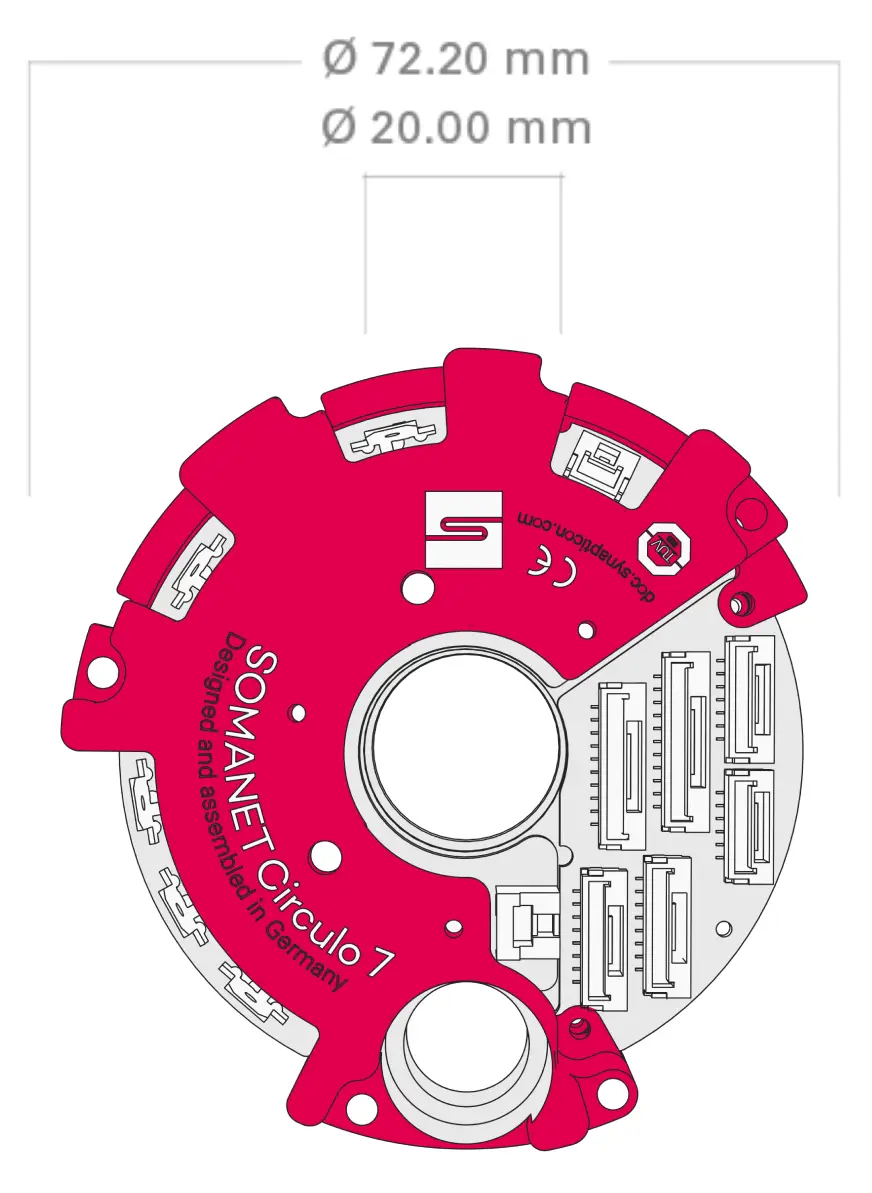
Two standard sizes for 72 and 92 mm with hollow shaft design
Designed for direct motor mounting
for a cool robot/machine body
Intelligent cable routing
High reliability of
processes
SOMANET CIRCULO IN YOUR PROJECT
DUAL HIGH RESOLUTION ABSOLUTE ENCODER
Circulo has up to two integrated absolute encoders without additional cables and without the need for cumbersome tools for encoder calibration.


- 2 x magnetic absolute encoders (up to 20 bit resolution)
- Dual-loop configuration for motor and gearbox output feedback
- Optional battery-powered multi-turn functionality
- Calibration and diagnostics GUI in the commissioning tool
- Very low profile, less than 5 mm for both encoders
INTEGRATED BRAKE SYSTEM
- The motor speed is reduced to a low level before the brake engages.
- The brake prevents the motor from rotating unintentionally (e.g., in the event of a power failure).
- In this way, the servo drive prevents unwanted contact with the workpiece being processed or between the robot and human.


CERTIFIED
THE FUTURE FOR REAL HUMAN-ROBOT COLLABORATION is now
STO prevents the trolley from restarting unplanned. STO enables safe working and has a wide range of applications with moving axes.
SBC enables the safe activation of a holding brake. The function is always activated in parallel with STO and used with STO or SS1. This prevents the movement of an axis in a torque-free state.
...
The SS1 function causes the motor to stop quickly and safely, and brings it to a standstill.
The SS2 function switches a motor off quickly and safely. If the motor comes to a standstill, a safe operating stop (SOS) is triggered.
SLS ensures that the drive does not exceed a defined speed limit and triggers an error response if this is exceeded.
The safety function monitors that the drive (and thus the element moved by the drive) does not exceed defined end positions.
Safely limited torque. The SLT function enables the torque to be reduced within a defined time; if the torque exceeds the SLT monitoring limit, the drive reacts with a "safe stop".
via FSoE (7 ms cycle time)
via FSoE (7 ms cycle time)
via FSoE (7 ms cycle time) - when connecting a safe torque sensor to the safe analog input.
via FSoE (7 ms cycle time)
SAFETY FIRST
The optional Safe Motion module for Circulo enables safe motion functions at SIL3, PL-e level via FSoE (FailSafe over EtherCAT). Realize your application in accordance with ISO/TS 15066.

OTHER PRODUCTS





