专家
专题讨论会提供的材料
用于移动
机器人的集成与
安全运动
您可以在此观看讲座的完整视频并下载演示文稿。 只需填写下面的表格,就可以获得发言的视频和幻灯片。
发言者和议题

Igor Osnizki 就机器和机器人系统的标准合规性和安全性发表了见解。
他强调了在机器的整个生命周期中遵守标准和进行全面风险评估的重要性。演讲概述了关键的安全措施,包括内在安全设计、工程保障和提供用户信息。重点将放在机器人的安全功能上,例如功率和力的限制。安全集成所需的工作因产品复杂程度而异,完全集成的组件可简化合规性。
使用预集成组件可简化安全实施并缩短开发时间。M&P 的演讲强调了安全集成在确保产品合规性和提高操作安全性方面的重要性。

Synapticon 介绍了移动机器人功能安全的开创性方法,并展示了自动导引车(AGV)和自主移动机器人(AMR)的下一代架构。
Synapticon 首席技术官 Andrija Feher 将讨论功能安全的核心原则,并强调遵守安全标准和规范以有效降低风险。Synapticon 的创新架构基于 Safety Over EtherCAT (FSoE),实现了向集成驱动系统和简化连接的模式转变。通过将伺服驱动器、安全编码器、制动器和电机集成在一个单元中,Synapticon 降低了成本、复杂性和维护成本,同时提高了系统可靠性和性能。演讲将展示 Synapticon 与行业合作伙伴的合作,以确保生态系统中广泛的兼容组件。通过战略联盟和技术合作,新思科技努力为客户提供符合其特定需求的全面解决方案。新基科技参考解决方案的案例研究展示了下一代 AGV/AMR 架构的实际应用。通过使用安全 PLC、运动控制器和安全扫描仪,该系统实现了全向运动学和实时速度监控,确保在动态环境中安全高效地运行。我们邀请与会者探索参考解决方案,并与 Synapticon 的专家进行讨论,以强调公司对移动机器人创新和安全的承诺。

Benedex 首席技术官兼联合创始人汤姆-芬奇(Tom Finch)将与您一起探讨用于设计和制造移动机器人的模块化移动性这一革命性概念。
在这个工程人才稀缺、上市时间至关重要的世界,Benedex 提供了一个类似乐高积木的部件系统,可以无缝连接,为各种应用创建定制的智能工业移动机器人。了解模块化移动机器人如何简化设计流程,使企业能够专注于创新,而无需聘请专业工程师或承担新开发的风险。了解 Benedex 的多功能硬件和软件解决方案,包括集成电机和控制系统的智能轮以及用于精确运动控制的控制器。借助 Benedex 在工程服务和咨询方面的专业知识,企业可以高效地将其移动机器人概念付诸实践,并无缝地从原型设计过渡到批量生产。观看完整演示,了解有关 Benedex 模块化移动解决方案的更多信息,以及它们如何改变和简化移动机器人项目。

与 VECTIONEER 首席执行官 Phillipe Piatkiewitz 一起体验移动机器人技术的历史和发展。从上世纪80年代的简单AGV(自动导引车)开始,Phillipe探讨了具有先进功能的自主机器人的发展之路。
了解更多有关SLAM(同步定位和绘图)、LiDAR等传感器的集成以及数据在优化物流和机器维护方面的关键作用等话题。了解 Vectioneer 的模块化运动软件如何为 AGV 和机器人提供无代码解决方案,为原始设备制造商提供可定制和适应性强的平台。洞察移动机器人技术的未来,了解创新技术如何提高效率和客户满意度。观看完整视频,了解机器人技术在不同行业中的应用。

在本讲座中,TÜV SUD 测试工程师 Lena Bitzek 将利用知名测试和认证机构 TÜV 的专业知识,就工业机械和机器人安全标准的合规性提供有价值的见解。
TÜV 拥有 150 多年的经验,业务遍布全球,为全球组织提供公正的评估和认证服务。Lena 讨论了不同类型机器人的主要安全标准、测试程序和合规要求,包括工业机器人、服务机器人和自主移动机器人 (AMR)。通过探讨 ISO 3691-4 和其他相关标准的范围,与会者将更深入地了解开拓国际市场和满足监管要求所需的安全措施。通过实际案例和对测试过程的详细介绍,Lena 强调了全面风险评估、文档和原型测试对认证的重要性。与会者将获得简化合规工作和提高工业环境安全性的实用见解。

请与 Motius 机器人应用系统工程师 Niklas Völker 一起,参加这场关于机器人应用边缘系统工程的精彩讲座。
了解 Motius 如何利用敏捷性和系统工程来开发创新的机器人解决方案--从概念到投产。Nicholas 将全面介绍 Motius 的方法、团队结构和实际案例,强调跨学科合作和敏捷方法在驾驭复杂技术环境中的重要性。您将获得有关下游系统工程、团队动态和迭代开发过程的宝贵见解,从而使机器人应用取得成功。千万不要错过这次向 Motius 专家学习的机会,在您的项目中发挥边缘系统工程的潜力。

传感器技术的领导者 SICK 将介绍移动平台安全集成方面的见解,重点关注合规性和安全性。
广泛的传感器产品组合包括导航、定位、运动控制和轻载处理解决方案。紧急停车和人员检测等基本安全功能对安全操作至关重要,突出了对复杂安全架构的需求。SICK 讨论了安全传感器的各种集成方法,从传统方法到利用现场总线通信的创新解决方案。将对每种集成方法的优缺点及其对不同移动平台配置的适用性进行评估。与会者将深入了解 SICK 未来的安全集成愿景,包括模块化控制解决方案和对各种运动配置的支持。演讲最后还将展望未来的发展,例如将控制模块直接集成到安全控制器中以简化操作。SICK 对创新和安全的承诺使客户能够在其移动平台的操作中实现最佳性能和合规性。

Neura Robotics 公司总部位于麦琴根,是认知机器人技术领域的先驱。该公司的目标是使机器人在工业、社会可持续发展和消费者等领域的各种应用中具有可访问性和适应性。
公司设想,未来机器人将成为人们日常生活中的伙伴。Neura 强调在与机器人互动时灵活性的重要性,允许用户以各种方式与机器人互动,而无需专业编程技能。演讲探讨了传统工业机器人和 cobots 的局限性,并强调了对更多功能和可定制机器人解决方案的需求。Neura 介绍了认知型机器人的概念,这种机器人能够自主解决问题并与人类合作。这些机器人配备了先进的传感器和人工智能,能够理解周围环境并与之有效互动。该公司的产品组合包括 cobots、认知机器人和 AGV(自动导引车),所有这些产品都旨在提高各行各业的效率和安全性。亚历山大-布拉斯博士强调了本地人工智能处理的重要性,它能使机器人在不依赖互联网连接的情况下独立运行。此外,布拉斯博士还在探索将 AGV 与机械臂结合起来,为各种应用创造移动机器人系统的潜力。公司的最终目标是将人工智能无缝集成到机器人机体中,为用户提供智能工具,协助他们完成各种任务。

Fraunhofer IPA 介绍了工程工具在安全流程自动化方面的潜力,重点是危险检测和风险缓解。
遵守 ISO 12100 和机器指南强调了采取全面安全措施的必要性。面临的挑战包括安全要求与机器人系统灵活性之间的平衡,因为机器人系统通常依赖于人工流程和领域知识。瓶颈在于耗时的安全评估和以人为本的考虑,这导致了潜在的错误和过度设计。为了克服这些挑战,弗劳恩霍夫工业自动化协会提出利用基于模拟的工具实现安全流程自动化。这些工具提供直观的操作、三维可视化,并通过自动危险检测和安全参数计算节省时间。计算机辅助风险评估(CARA)软件就是这种方法的一个例子,它可以自动识别危险、布置保护措施和估算关键绩效指标。通过支持模拟和后处理,CARA 使安全评估和文件编制更加合理。此外,Theo Jacobs 还将介绍 Robo-Dashcam,这是一种通过捕捉和分析真实世界数据来优化安全概念的工具。通过跟踪人类与机器人的互动,Robo-Dashcam 可以识别优化潜力,并为迭代风险评估提供信息。最终目标是实现全自动安全流程,利用人工智能和仿真技术提高技术应用的安全性和生产率。












低电压

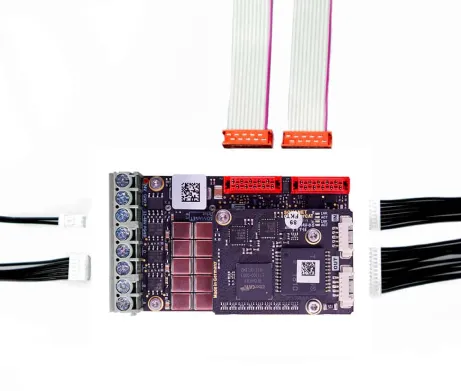
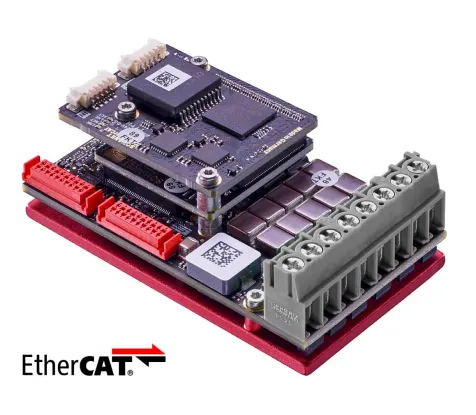
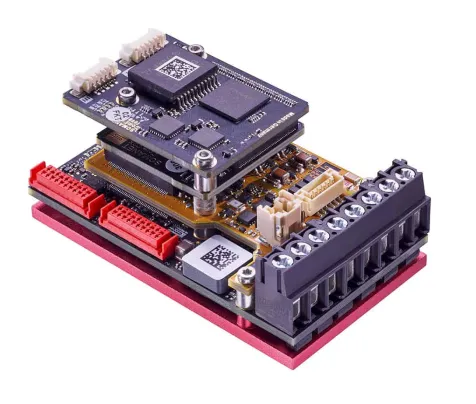
面向未来的机器人技术的 SOMANET Node
伺服驱动器中的更多智能
我们的伺服驱动系统可与您自己的软件进行本地组合。这样,您就可以直接在驱动器上实现基于传感器信号的反射和其他定制算法 。
从测试套件开始
测试带有永磁同步电机 (PMSM/BLDC) 的SOMANET Node,这些电机的最大功率可达2000 W (48 V / 66 arm),并将它们作为从站集成到您的EtherCAT系统中。


- 具有所需额定功率(20 - 100 A)的 SOMANET Node
- 电缆
- 一个可随身携带的盒子
- 一个OBLAC工具(可选)