
SOMANET
SAFE MOTION
全面提升
运动控制安全性


100%
安全
认证
认证

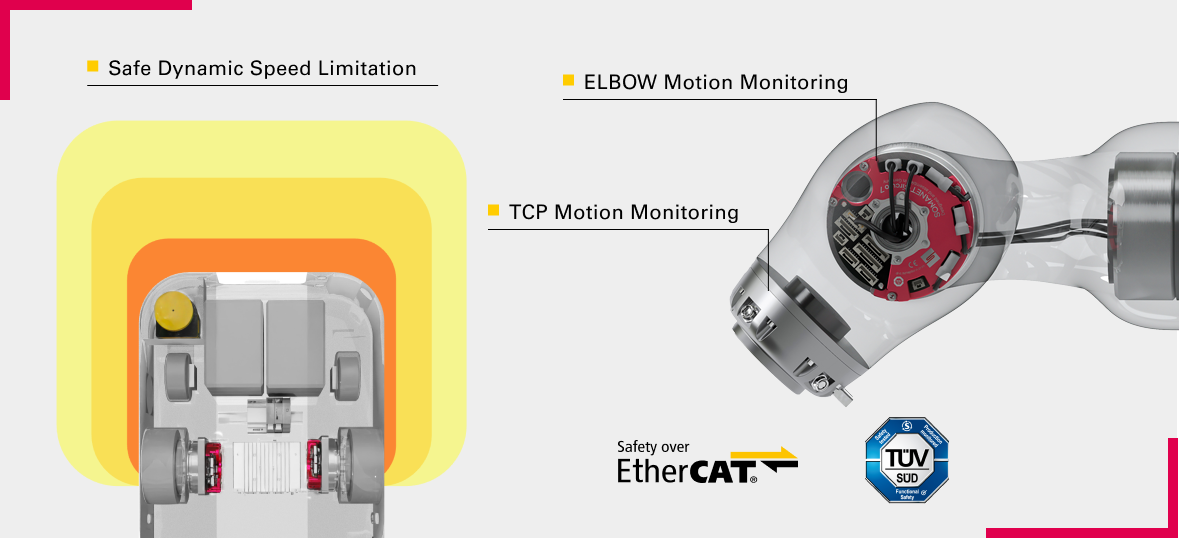
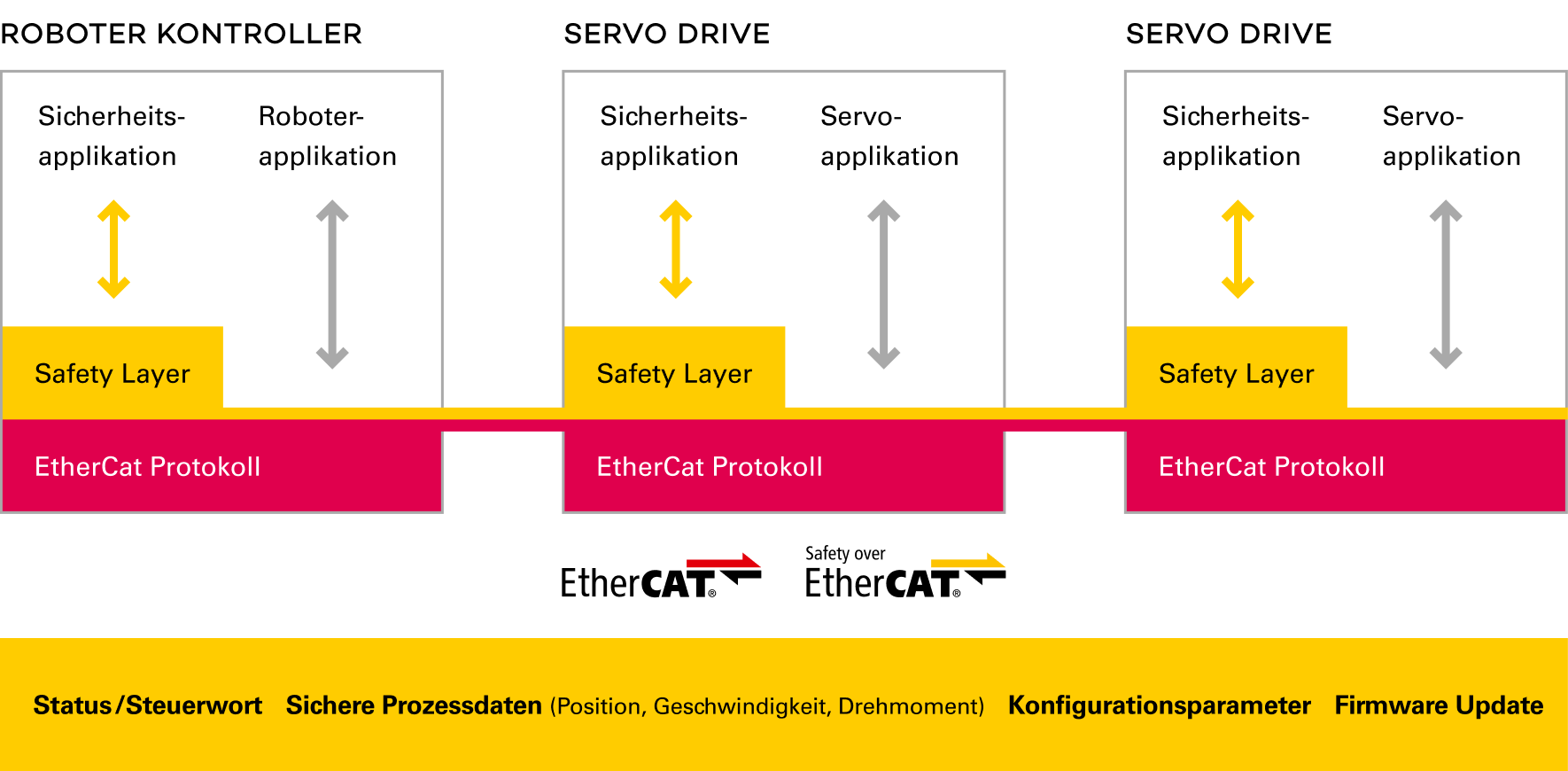
SOMANET Safe Motion通过 Fail Safe over EtherCAT (FSoE),提供一系列经SIL3 PLe认证的安全和安全运动功能。迄今为止,还未有一款低压伺服驱动器可以在安全性能的前提下提供如此广泛的功能。
SOMANET Safe Motion安装在处理器模块和驱动模块之间。这样,安全扩展就可以生成和接收安全关键信号 ,而无需修改现有硬件或对解决方案进行复杂的布线。SOMANET Safe Motion提供STO、SBC、SS1、SS2、SLS、SLP、SLT等安全功能,所有这些功能均可通过FSoE 或 I/O实现。
SOMANET Safe Motion安装在处理器模块和驱动模块之间。这样,安全扩展就可以生成和接收安全关键信号 ,而无需修改现有硬件或对解决方案进行复杂的布线。SOMANET Safe Motion提供STO、SBC、SS1、SS2、SLS、SLP、SLT等安全功能,所有这些功能均可通过FSoE 或 I/O实现。
下载
.svg)
ETHERCAT 一致性


100%
安全
认证
认证
人类与机器人真正协作的未来
STO - 安全扭矩关闭
STO可防止小车意外重新启动。STO可确保工作安全,并可广泛应用于移动轴。
SBC - 安全抱闸控制
SBC可安全启动抱闸。该功能始终与STO并行激活,并与STO或SS1一起使用。这可防止轴在无扭矩状态下移动。
SBT* - 安全抱闸测试 *
...
SS1 - 安全停止 1
SS1 功能可使电机快速、安全地停止,并达到静止状态。
SS2 - 安全停止 2
SS2功能可快速、安全地关闭电机。如果电机停转,则会触发安全运行停止 (SOS)。
SLS - 安全限速
SLS可确保驱动器不超过规定的速度限制,并在超过时触发错误响应。
SLP - 安全限制位置*
安全功能可监控驱动装置(以及由驱动装置移动的元件)是否超出规定的末端位置。
SLT - 安全限制扭矩*
安全限制扭矩。SLT功能可在规定时间内降低扭矩;如果扭矩超过 SLT监控极限,驱动装置会做出 "安全停止 "反应。
安全速度过程数据
通过FSoE(7 毫秒周期时间)
安全位置过程数据
通过FSoE(7 毫秒周期时间)
安全扭矩过程数据
通过FSoE(7 毫秒周期时间)- 将安全扭矩传感器连接到安全模拟输入端时。
安全数字输入输出和安全模拟输入
通过FSoE(7 毫秒周期时间)
*必须在安全控制器中使用安全过程数据实现这些功能。
安全第一
Circulo的可选安全运动模块可通过FSoE(EtherCAT 上的故障安全)实现 SIL3、PL-e 级的安全运动功能。实现符合 ISO/TS 15066 标准的应用。
FSoE通信
SOMANET集成抱闸系统
SOMANET集成抱闸系统可防止机器人的任意移动。同时避免任何不必要的接触,例如人与机器人之间的接触。抱闸系统的磁性操作仅在电机驱动关闭或紧急停止时才会做出反应。
更小
节省 60% - 90 % 的空间
更轻
重量减轻 50% - 90%
更经济
功耗降低 65% - 90 %(3 W)
- 在制动器接合之前,电机转速会降低到较低水平。
- 抱闸可防止电机意外旋转(例如在断电情况下)。
- 这样,伺服驱动器就能防止机器人与正在加工的工件或机器人与人之间发生不必要的接触 。
已经建立合作关系的客户

凭借Synapticon公司的安全认证,我们作为驱动器制造商能够为客户提供 "即用型"产品。
Felix Riesterer
"Synapticon的技术使伺服驱动器的功率密度、效率和性能达到了一个新的水平。我深信,这将在运动控制领域掀起一场革命。”
Elie Belbel
"在同时需要速度、性能和灵活性的情况下,没有什么能与Synapticon的模块化驱动和IO解决方案相媲美。它使我们能够快速响应许多客户的特殊要求"。
Mike Mayer
"借助Synapticon的技术,机器人制造商可以提高产品性能,降低成本,并专注于最重要的事情:通过产品多样性和出色的应用软件解决客户的问题。
Till Reuter
"Synapticon填补了现代机器人驱动技术的一项重要空白。灵活性、卓越性和易用性在单一解决方案中从未如此接近"。
Ulrich Reiser
"Synapticon为分布式控制开发了一种高度创新的控制芯片系统,可实现更简单的运动控制和多传感器输入的实时集成。我们相信,凭借这一独特的电子神经系统,Synapticon将很有可能对行业产生强有力的影响"。
Henri Mrejen
应用
SOMANET SAFE MOTION
对人机协作的需求与日俱增。自主物流也正经历着巨大的增长。在人与移动机器人并肩作战的工厂环境中,渐进式功能安全的重要性与日俱增。
这就要求机器人的内在功能安全达到一个新的水平。您可以从先进的安全理念中获益,尤其是在生产空间有限的情况下。得益于 SOMANET Safe Motion,您不再需要机器人笼。
而且,由于安全可靠的运动控制,现在的系统设计可以实现在运行过程中执行维护程序。中断生产是 "老一套"。而降低总体拥有成本则是新趋势。
这就要求机器人的内在功能安全达到一个新的水平。您可以从先进的安全理念中获益,尤其是在生产空间有限的情况下。得益于 SOMANET Safe Motion,您不再需要机器人笼。
而且,由于安全可靠的运动控制,现在的系统设计可以实现在运行过程中执行维护程序。中断生产是 "老一套"。而降低总体拥有成本则是新趋势。


自动化组件和创新自动化机器设备

专业的AMR、AGV和服务机器人。

协作机器人、工业和轻型机械臂
更多产品


ACTILINK-S
200 - 1000W

评估套件节点
1000/2000/400

评估套件 节点安全
1000/2000/400

SOMANET Node Safety
最大峰值功率输出2,000 W
您有任何问题吗?
我们很乐意就我们产品的潜在用途为您提供建议。
请在项目开发的任何阶段与我们联系。
请在项目开发的任何阶段与我们联系。
