BEitrÄGE des EXPERTEN
SYMPOSIUMS
INTEGRATED &
SAFE MOTION
für MOBILE
ROBOTIK
Hier können sie die Videos der Vorträge in voller Länge ansehen und die Präsentationen herunterladen. Einfach kurz das folgende Formular ausfüllen, dann gelangen Sie zu den Videos und Slidedecks der Beiträge.
Die Redner und die Themen

Igor Osnizki präsentiert Einblicke in die Einhaltung von Normen und die Sicherheit von Maschinen und Robotersystemen.
Er betont die Bedeutung der Einhaltung von Normen und einer umfassenden Risikobewertung während des gesamten Lebenszyklus von Maschinen. Die Präsentation umreißt die wichtigsten Sicherheitsmaßnahmen, darunter die inhärent sichere Konstruktion, technische Schutzmaßnahmen und die Bereitstellung von Benutzerinformationen. Besonderes Augenmerk wird auf Sicherheitsfunktionen für Roboter gelegt, mit Beispielen wie Leistungs- und Kraftbegrenzung. Der für die Sicherheitsintegration erforderliche Aufwand variiert je nach Produktkomplexität, wobei vollständig integrierte Komponenten die Einhaltung der Vorschriften vereinfachen.
Die Chancen liegen in der Verwendung von vorintegrierten Komponenten, um die Sicherheitsimplementierung zu vereinfachen und die Entwicklungszeit zu verkürzen. Die Präsentation von M&P unterstreicht die Bedeutung der Sicherheitsintegration für die Gewährleistung der Produktkonformität und die Verbesserung der Betriebssicherheit.

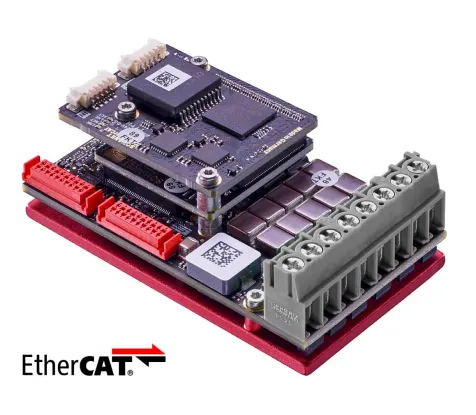
Synapticon stellt einen bahnbrechenden Ansatz für die funktionale Sicherheit in der mobilen Robotik vor und präsentiert die Architektur der nächsten Generation für fahrerlose Transportsysteme (AGVs) und autonome mobile Roboter (AMRs).
Andrija Feher, CTO von Synapticon geht auf die Kernprinzipien der funktionalen Sicherheit ein und betont die Einhaltung von Sicherheitsstandards und -normen, um Risiken effektiv zu minimieren. Die innovative Architektur von Synapticon basiert auf Safety Over EtherCAT (FSoE) und bietet einen Paradigmenwechsel hin zu integrierten Antriebssystemen und vereinfachter Konnektivität. Durch die Kombination von Servoantrieben, Sicherheitsdrehgebern, Bremsen und Motoren in einer einzigen Einheit reduziert Synapticon Kosten, Komplexität und Wartungsaufwand und erhöht gleichzeitig die Zuverlässigkeit und Leistung des Systems. Die Präsentation zeigt die Zusammenarbeit von Synapticon mit Industriepartnern, um ein breites Spektrum an kompatiblen Komponenten innerhalb des Ökosystems zu gewährleisten. Durch strategische Allianzen und Technologiepartnerschaften ist Synapticon bestrebt, seinen Kunden umfassende Lösungen zu bieten, die auf ihre spezifischen Bedürfnisse zugeschnitten sind. Eine Fallstudie mit einer Synapticon-Referenzlösung demonstriert die praktische Anwendung der FTS/AMR-Architektur der nächsten Generation. Durch den Einsatz von Safety PLCs, Motion Controllern und Sicherheitsscannern erreicht das System eine omnidirektionale Kinematik und eine Geschwindigkeitsüberwachung in Echtzeit, was einen sicheren und effizienten Betrieb in dynamischen Umgebungen gewährleistet. Die Teilnehmer sind eingeladen, die Referenzlösung zu erkunden und mit den Experten von Synapticon zu diskutieren, um das Engagement des Unternehmens für Innovation und Sicherheit in der mobilen Robotik zu unterstreichen.

Begleiten Sie Tom Finch, CTO und Mitbegründer von Benedex, bei der Erforschung des revolutionären Konzepts der modularen Mobilität für die Entwicklung und den Bau von mobilen Robotern.
In einer Welt, in der Ingenieurtalente knapp sind und die Zeit bis zur Markteinführung entscheidend ist, bietet Benedex ein Lego-ähnliches System von Teilen, die sich nahtlos verbinden lassen, um maßgeschneiderte intelligente mobile Industrieroboter für verschiedene Anwendungen zu schaffen. Entdecken Sie, wie modulare Mobilität den Designprozess vereinfacht und es Unternehmen ermöglicht, sich auf Innovationen zu konzentrieren, ohne spezialisierte Ingenieure einzustellen oder sich den Risiken einer Neuentwicklung auszusetzen. Entdecken Sie die vielseitigen Hardware- und Softwarelösungen von Benedex, darunter intelligente Räder mit integrierten Motoren und Steuerungssystemen sowie Steuerungen für eine präzise Bewegungssteuerung. Mit der Expertise von Benedex in den Bereichen Ingenieurdienstleistungen und Beratung können Unternehmen ihre mobilen Roboterkonzepte effizient zum Leben erwecken und nahtlos vom Prototyping zur Massenproduktion übergehen. Sehen Sie sich die vollständige Präsentation an, um mehr über die modularen Mobilitätslösungen von Benedex zu erfahren und darüber, wie sie mobile Robotikprojekte verändern und vereinfachen können.

Erleben Sie mit Phillipe Piatkiewitz, CEO von VECTIONEER, die Geschichte und Entwicklung der mobilen Robotik. Angefangen mit einfachen AGVs (Automated Guided Vehicles) in den 80er Jahren, erörtert Phillipe den Weg zu autonomen Robotern mit fortschrittlichen Funktionalitäten.
Erfahren Sie mehr über Themen wie SLAM (Simultaneous Localization and Mapping), die Integration von Sensoren wie LiDAR und die entscheidende Rolle von Daten bei der Optimierung von Logistik und Maschinenwartung. Entdecken Sie, wie die modulare Bewegungssoftware von Vectioneer eine No-Code-Lösung für FTS und Roboter bietet und OEMs anpassbare und anpassungsfähige Plattformen zur Verfügung stellt. Gewinnen Sie einen Einblick in die Zukunft der mobilen Robotik und erfahren Sie, wie innovative Technologien die Effizienz und Kundenzufriedenheit steigern können. Sehen Sie sich das vollständige Video an, um weitere Anregungen und Einblicke in die Möglichkeiten der Robotik in verschiedenen Branchen zu erhalten.

In diesem Vortrag gibt Lena Bitzek, Prüfingenieurin bei TÜV SUD, wertvolle Einblicke in die Einhaltung von Sicherheitsstandards für Industriemaschinen und Robotik und stützt sich dabei auf das Fachwissen des TÜV, einer renommierten Prüf- und Zertifizierungsorganisation.
Mit mehr als 150 Jahren Erfahrung und globaler Präsenz bietet der TÜV unparteiische Bewertungen und Zertifizierungsdienste für Unternehmen weltweit an. Lena erörtert die wichtigsten Sicherheitsstandards, Prüfverfahren und Konformitätsanforderungen für verschiedene Arten von Robotern, darunter Industrieroboter, Serviceroboter und autonome mobile Roboter (AMRs). Durch die Erkundung des Geltungsbereichs der ISO 3691-4 und anderer relevanter Normen erhalten die Teilnehmer ein tieferes Verständnis der Sicherheitsmaßnahmen, die für die Navigation auf internationalen Märkten und die Erfüllung gesetzlicher Anforderungen erforderlich sind. Anhand von Beispielen aus der Praxis und einem detaillierten Überblick über den Prüfprozess unterstreicht Lena die Bedeutung von gründlichen Risikobewertungen, Dokumentationen und Prototypentests für die Zertifizierung. Die Teilnehmer erhalten praktische Einblicke in die Rationalisierung von Konformitätsbemühungen und die Verbesserung der Sicherheit in industriellen Umgebungen.

Nehmen Sie mit Niklas Völker, Systemingenieur für Roboteranwendungen bei Motius, an dieser aufschlussreichen Sitzung über Edge Systems Engineering für Roboteranwendungen teil.
Erfahren Sie, wie Motius Agilität und Systemtechnik einsetzt, um innovative Roboterlösungen zu entwickeln - von der Konzeption bis zur Produktionseinführung. Nicholas gibt einen umfassenden Überblick über den Ansatz von Motius, die Teamstruktur und Beispiele aus der Praxis, die die Bedeutung interdisziplinärer Zusammenarbeit und agiler Methoden bei der Navigation durch komplexe technologische Landschaften hervorheben. Gewinnen Sie wertvolle Einblicke in die nachgelagerte Systemtechnik, die Teamdynamik und den iterativen Entwicklungsprozess, der den Erfolg von Roboteranwendungen ausmacht. Lassen Sie sich diese Gelegenheit nicht entgehen, von den Experten von Motius zu lernen und das Potenzial von Edge Systems Engineering in Ihren Projekten zu nutzen.

SICK, ein führendes Unternehmen in der Sensortechnologie, präsentiert Einblicke in die Sicherheitsintegration für mobile Plattformen mit Schwerpunkt auf Compliance und Sicherheit.
Das umfangreiche Sensorportfolio umfasst Lösungen für die Navigation, Positionierung, Bewegungssteuerung und das Handling geringer Lasten. Wesentliche Sicherheitsfunktionen wie Not-Aus und Personenerkennung sind entscheidend für den sicheren Betrieb, was den Bedarf an ausgefeilten Sicherheitsarchitekturen verdeutlicht. SICK erörtert verschiedene Integrationsmethoden für Sicherheitssensoren, von traditionellen Ansätzen bis hin zu innovativen Lösungen, die die Feldbuskommunikation nutzen. Jede Integrationsmethode wird hinsichtlich ihrer Vor- und Nachteile sowie ihrer Eignung für verschiedene mobile Plattformkonfigurationen bewertet. Die Teilnehmer erhalten Einblicke in die Vision von SICK für die künftige Sicherheitsintegration, einschließlich modularer Steuerungslösungen und Unterstützung für verschiedene kinematische Konfigurationen. Die Präsentation schließt mit einem Ausblick auf kommende Entwicklungen, wie z. B. die Integration von Steuerungsmodulen direkt in Sicherheitssteuerungen für einen rationellen Betrieb. Das Engagement von SICK für Innovation und Sicherheit ermöglicht es den Kunden, optimale Leistung und Konformität beim Betrieb ihrer mobilen Plattformen zu erreichen.

Neura Robotics mit Sitz in Metzingen leistet Pionierarbeit auf dem Gebiet der kognitiven Robotik. Ziel ist es, Roboter für verschiedene Anwendungen zugänglich und anpassungsfähig zu machen, unter anderem in den Bereichen Industrie, soziale Nachhaltigkeit und Verbraucher.
Das Unternehmen stellt sich eine Zukunft vor, in der Roboter als Begleiter des Menschen im Alltag dienen. Neura betont die Bedeutung der Flexibilität bei der Interaktion mit Robotern, die es den Nutzern ermöglicht, auf vielfältige Weise mit Robotern zu interagieren, ohne dass dafür spezielle Programmierkenntnisse erforderlich sind. Die Präsentation geht auf die Grenzen herkömmlicher Industrieroboter und Cobots ein und verdeutlicht den Bedarf an vielseitigeren und anpassungsfähigeren Roboterlösungen. Neura stellt das Konzept der kognitiven Roboter vor, die in der Lage sind, eigenständig Probleme zu lösen und mit dem Menschen zusammenzuarbeiten. Diese Roboter sind mit fortschrittlichen Sensoren und künstlicher Intelligenz ausgestattet, um ihre Umgebung zu verstehen und effektiv mit ihr zu interagieren. Das Produktportfolio des Unternehmens umfasst Cobots, kognitive Roboter und AGVs (Automated Guided Vehicles), die alle dazu dienen, die Effizienz und Sicherheit in verschiedenen Branchen zu verbessern. Dr. Alexander Blass unterstreicht die Bedeutung lokaler KI-Verarbeitung die es Robotern ermöglicht, unabhängig von Internetverbindungen zu funktionieren. Darüber hinaus erforscht Dr. Blass das Potenzial der Kombination von FTS mit Roboterarmen, um mobile Robotersysteme für verschiedene Anwendungen zu schaffen. Das ultimative Ziel des Unternehmens ist die nahtlose Integration von KI in Roboterkörper, um den Benutzern intelligente Werkzeuge zur Verfügung zu stellen, die sie bei einer Vielzahl von Aufgaben unterstützen.

Das Fraunhofer IPA stellt das Potenzial von Engineering-Tools zur Automatisierung von Sicherheitsprozessen vor, wobei der Schwerpunkt auf der Gefahrenerkennung und Risikominderung liegt.
Die Einhaltung von ISO 12100 und Maschinenrichtlinien unterstreicht die Notwendigkeit umfassender Sicherheitsmaßnahmen. Zu den Herausforderungen gehört der Spagat zwischen den Sicherheitsanforderungen und der Flexibilität von Robotersystemen, die oft auf manuelle Prozesse und Domänenwissen angewiesen sind. Der Engpass liegt in zeitaufwändigen Sicherheitsbewertungen und menschenzentrierten Überlegungen, die zu potenziellen Fehlern und Over-Engineering führen. Um diese Herausforderungen zu bewältigen, schlägt das Fraunhofer IPA vor, Sicherheitsprozesse mit simulationsbasierten Werkzeugen zu automatisieren. Diese Werkzeuge bieten intuitive Bedienung, 3D-Visualisierung und Zeitersparnis durch automatisierte Gefahrenerkennung und Berechnung von Sicherheitsparametern. Die Software zur computergestützten Risikobewertung (CARA) ist ein Beispiel für diesen Ansatz und ermöglicht die automatische Identifizierung von Gefahren, die Platzierung von Schutzmaßnahmen und die Schätzung von KPIs. Durch die Unterstützung von Simulationen und Nachbearbeitungen rationalisiert CARA die Sicherheitsbewertung und Dokumentation. Darüber hinaus stellt Theo Jacobs Robo-Dashcam vor, ein Tool zur Optimierung von Sicherheitskonzepten durch Erfassung und Analyse von Daten aus der realen Welt. Durch die Verfolgung menschlicher Interaktionen mit Robotern identifiziert Robo-Dashcam Optimierungspotenzial und liefert Informationen für iterative Risikobewertungen. Das ultimative Ziel sind vollautomatische Sicherheitsprozesse, die KI und Simulation nutzen, um die Sicherheit und Produktivität in technischen Anwendungen zu verbessern.












KLEIN-SPANNUNG

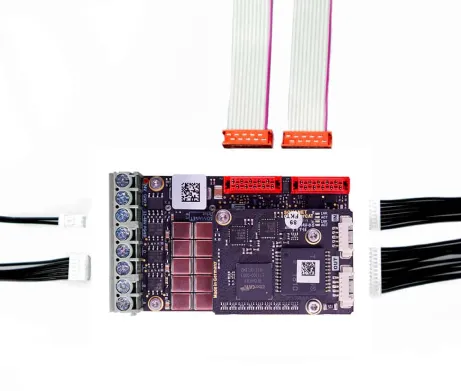
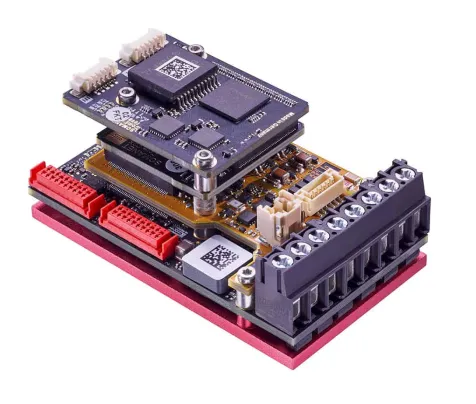
SOMANET NODES FÜR ZUKUNFTSWEISENDE ROBOTIK
MEHR INTELLIGENZ
IN ServoANTRIEBEN
Unsere Servo-Drive-Systeme lassen sich mit Ihrer eigenen Software lokal kombinieren. So können Sie Reflexe auf Basis von Sensorsignalen und andere kundenspezifische Algorithmen direkt auf dem Antrieb implementieren.
STARTEN SIE MIT EINEM EVALUIERUNGSKIT
Testen Sie die SOMANET Nodes mit Permanentmagnet-Synchronmoto-ren (PMSM/BLDC) verschiedener Baugrößen bis 2000 W (48 V / 66 Arms) und integrieren Sie diese als Slaves in Ihr EtherCAT-System.


- Ein SOMANET Node mit der gewünschten Nennleistung (20 – 100 A)
- Kabel
- Eine handliche Box
- Eine OBLAC Drive Box (optional)